
نظریه سی پی اچ بر اساس تعمیم سرعت نور از انرژی به ماده بنا شده است.
سی پی اچ در ژورنالها
|
نگاهى به گذشته و آينده روبات ها
|
|
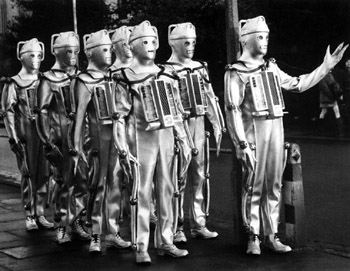
در يك تعريف بسيار ساده و ابتدايى مى توان گفت روبات ها ماشين هايى قابل كنترل توسط كامپيوترها هستند كه برنامه ريزى شده اند تا حركت كنند، اشياى خاصى را جابه جا كنند و كارهاى ديگرى كه در محدوده كارى آنها قرار دارد، انجام دهند. روبات ها مى توانند كارهاى تكرارى را سريع تر، ارزان تر و دقيق تر از انسان ها انجام دهند. لغت روبات از كلمه چكسلواكى robota به معنى نيروى كار اجبارى، گرفته شده است. كلمه روبات اولين بار در سال ۱۹۲۱ توسط كارل كپك، رمان نويس و نمايشنامه نويس اهل چكسلواكى استفاده شد. كلمه روبات به ماشينى گفته شده بود كه براى كمك به انسان كارهايى را كه براى انسان سخت و نامطلوب يا ناخوشايند است، انجام مى دهد. روبات ها در فيلم ها به صورت خيالى و خارق العاده و هوشمند و گاهى اوقات موجودات مصنوعى خطرناك به تصوير كشيده مى شوند. اما روبات ها در حقيقت براى انسان ها كار مى كنند و كارها و ماموريت هايى كه ممكن است براى آنها خطرناك باشد، انجام مى دهند. در آينده، روبات ها در مدارس، منازل و حتى در بخش هايى از بدن انسان حضور خواهند داشت. در اوايل قرن هجدهم، براى اولين بار عروسك هاى خيمه شب بازى مكانيكى در اروپا ساخته شد. اين عروسك ها روبات خوانده مى شدند و توسط حلقه هاى متصل به هم گردانده مى شدند و توسط انتخاب گرهاى استوانه دوار كنترل مى شدند. در ۱۸۰۱ جوزف ماريا جكوارد يك دستگاه بافندگى خودكار اختراع كرد. اين دستگاه براى كنترل بالا رفتن نخ ها در كارخانه هاى پارچه استفاده مى شد و اولين دستگاهى بود كه مى توانست برنامه اى را ذخيره كند و يك ماشين را كنترل كند. پس از آن متداوماً تغييرات بسيار اندكى در سير تحول روبات ها رخ مى داد، اما به كندى به جلو حركت مى كرد. در اواخر دهه پنجاه و اوايل دهه شصت، اولين روبات هاى صنعتى به نام Unimate توسط جورج دول و جو اينگلبرگ ارايه شد. اولين امتياز ثبت اختراع به نام دول بود، اما اينگلبرگ نخستين روبات بازارى را ساخت. از اين رو اينگلبرگ «پدر علم روباتيك» ناميده شده است. در سال ،۱۹۵۴ جورج دول يك بازوى مصنوعى با چندين اتصال ارائه كرد كه مقدمه اى براى روبات هاى پيشرفته امروزى شد. پس از آن يك مهندس مكانيك به نام ويكتور شينمن، يك بازوى انعطاف پذير ساخت كه تحت عنوان بازوى دستى جهانى قابل برنامه ريزى (PUMA) شناخته شد.
قانون روبات ها در سال ۱۹۵۰ ايساك آسيموف، دانشمند و نويسنده داستان هاى علمى و تخيلى قوانين روبات ها را مطرح كرد: اول: روبات نبايد به هيچ انسانى آسيب برساند يا عملكرد آن موجب زيان رساندن به كسى شود. دوم: روبات بايد از دستوراتى كه توسط انسان ها به آن داده شده است، پيروى كند، مگر اينكه آن دستورات با قانون اول تعارض داشته باشد. و سوم: روبات بايد از وجود خود محافظت كند تا زمانى كه اين موضوع با دو قانون اول تضاد نداشته باشد. در سال ۱۹۸۳ روبات هاى متحرك با معرفى يك روبات كه به شكل يك خودرو كوچك با شش چرخ بود و مى توانست از اشيا بالا برود، وارد صحنه شدند. اين وسيله مى توانست پنج تا شش برابر وزن خود را بلند كند و دو يا سه برابر وزنش را جابه جا كند.
كارهاى خطرناك و تكرارى
علم طراحى و ساخت
روبات ها موجب كيفيت بهتر و هزينه كمتر در صنعت توليد شده است.
البته ممكن است باعث صدمه زدن به مشاغل غيرتخصصى شود، اما موجب
ايجاد شغل هاى جديدى براى افراد متخصص در نرم افزار و حس گرها
مى شود. افرادى ممكن است مشاغل غيرتخصصى خود را از دست بدهند و
افرادى با اين مهارت ها آموزش ببينند. روبات هايى كه در خطوط توليد
استفاده مى شوند باعث مى شوند كه بسيارى از مشاغلى كه توسط
انسان ها انجام مى شده است، از مسير توليد خارج شود و اين موضوع
موجب كم شدن هزينه شركت ها مى شود، اما بسيارى از كارگران شغل خود
را از دست مى دهند.
البته روبات ها فقط در صنعت استفاده نمى شوند. مرد حلبى (Tin Man) يك صندلى چرخدار مكانيكى است كه براى افرادى با معلوليت بسيار زياد به كار مى رود و توسط شركت KISS ساخته شده است. اين روبات مى تواند راه خود را از بين ورودى ها و راهروها پيدا كند و برخى مسيريابى هاى محدود را انجام دهد.
روبات هاى بااحساس دانشمندانى در سراسر دنيا در جست وجوى مولفه هايى براى توسعه روبات هاى اجتماعى پيشرفته هستند، از قبيل سيستم هاى تشخيص احساسات و سيستم هاى بيان احساسات. هر روباتى كه به طور طبيعى با انسان رابطه دارد، نياز دارد تا بتواند حالات و بيان عواطف انسان را تشخيص دهد و احساسات خود را به شكلى كه براى انسان قابل فهم است، بيان كند. يكى از پيشگامان در اين زمينه تحقيقاتى سينتيا بريزيل است كه دانشمندى در علم روباتيك در موسسه تكنولوژى ماساچوست است و يك روبات شبيه سر انسان و گويا ساخته است به نام Kismet.
اين روبات داراى
پلك ها، چشم ها و لب هاى متحرك است كه انواعى از بيان هاى احساسى
را براى آن ممكن مى كند. Kismet زمانى
كه تنها است به نظر غمگين مى رسد، اما زمانى كه وجود چهره يك انسان
را درك مى كند، لبخند مى زند. اگر اتومبيل خيلى سريع حركت كند،
چهره بيانگر ترس آن هشدار مى دهد كه چيزى اشتباه است. روبات ديگرى
كه بيانگر احساسات است WE-4R ناميده
مى شود كه توسط آتسو تاكانيشى و همكارانش در ژاپن ساخته شده است.
اين روبات علاوه بر سر مى تواند نيم تنه خود را حركت بدهد و
بازوهاى خود را تكان بدهد و احساسات خود را نشان بدهد. تكنولوژى با
چنان سرعتى پيشرفت مى كند كه برخى نگران هستند كه چه اتفاقى خواهد
افتاد، زمانى كه احساسات روبات ها شبيه عواطف ما انسان ها شود. آينده روبات ها احتمالاً مهمترين تغييراتى كه در آينده روبات ها چشمگير خواهد بود، افزايش توانايى آنها در استدلال و درك كردن مسائل است. هوش مصنوعى به سرعت از آزمايشگاه هاى دانشگاه ها تا كاربردهاى عملى در صنعت در حال رشد است و روبات ها در حال توسعه هستند تا بتوانند وظايفى را كه نياز به شناخت و درك دارد انجام دهند. در آينده، تشخيص خطا و نقص در هواپيماها و ماهواره ها، مديريت و سازماندهى يك ميدان نبرد يا كنترل يك كارخانه بزرگ، توسط كامپيوترهاى هوشمند انجام خواهد شد. براى درك اين مطلب كه روبات ها سى سال بعد، يعنى در سال ،۲۰۳۵ چه پيشرفتى خواهند كرد، بازى ويديويى Pong را در نظر بگيريد كه در سال ۱۹۷۳ پيشرفته ترين نوع خود بود. در اين بازى يك نقطه سفيد نمايشگر توپ تنيس بود كه در يك صفحه سياه عقب و جلو مى رفت و بازيكنان با تغيير دكمه دسته فرمان بازى، توپ را بالا و پايين مى كردند! با استانداردهاى امروزى، اين بازى به طور باورنكردنى قديمى و اوليه است. به همين شكل روبات هاى امروزى به نظر مردم سال ۲۰۳۵ قديمى مى رسند! آيا انسان ها در سال ۲۰۳۵ به روبات هاى اوليه سال ۲۰۰۵ نگاه مى كنند و آرزو مى كنند كاش روبات ها تا اين اندازه پيشرفت نكرده بودند؟ اگر مى خواهيم در آينده شاهد نبرد بين انسان ها و روبات ها نباشيم، بايد بينديشيم كه چگونه مطمئن شويم كه روبات ها مطمئن و بى خطر باقى خواهند ماند، حتى زمانى كه آنها بسيار هوشمند باشند. همانطور كه آمد، ايساك آسيموف سه قانون براى برنامه ريزى روبات ها پيشنهاد داده است تا مانع خطرناك شدن آنها شود. در ابتدا اين سه قانون براى اينكه روبات ها را سر جاى خودشان بنشانيم، بسيار خوب به نظر مى آيند. اما دانشمندان روباتيك با مشكلات بسيارى مواجه هستند. آنچه به نظر مى آيد اين است كه براى جلوگيرى از آسيب رساندن روبات هاى هوشمند به انسان ها، مسائل بسيار پيچيده ترى از اين سه قانون وجود دارد.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 |
|
Sub quantum space and interactions from photon to fermions and bosons |
آرشیو موضوعی
|
|

از آغاز کودکی به پدیده های فیزیکی و قوانین حاکم بر جهان هستی کنجکاو بودم. از همان زمان دو کمیت زمان و انرژی بیش از همه برایم مبهم بود. می خواستم بدانم ماهیت زمان چیست و ماهیت انرژی چیست؟